
Kismet was an early robotic research project at MIT Media Lab that helped draw popular attention to the possibility of expressive communication between robots and people. Rather than go out down the uncanny valley of making a robot appear human, Kismet’s designers created a shiny elfin face more like a pet than a conversation partner. Kismet’s ears popped up and down like a dog that’s curious one moment and cowering the next. Only later in life did Kismet speak English.
The researcher most associated with Kismet is Cynthia Breazeal, a PhD student at the time, who is now on Faculty at Media Arts and Sciences at MIT. Here participation was essential to Kismet’s identity. Breazeal appears in a large number of videos documenting her research, showing her complex expressive interactions with Kismet, and discussing the significance of the work.
When cultural anthropologist Lucy Suchman (2006) visited the lab, though, Kismet was not so responsive. It seemed Breazeal and Kismet were inseparable.
…in contrast to the interactants pictured in the website videos, none of our party was successful in eliciting coherent or intelligible behaviors from it. Framed as an autonomous entity Kismet… must be said to have failed in its encounters with my colleagues and me… The contrast between my own encounter with Kismet and that recorded on the demonstration videos makes clear the ways in which Kismet’s affect is an effect not simply of the device itself, but of Breazeal’s trained reading of Kismet’s actions and her extended history of labors with the machine. In the absence of Breazeal, correspondingly, Kismet’s apparent randomness attests to the robot’s reliance on the performative capabilities of its very particular ‘human caregiver’.
Suchman’s observations align with my inclination to approach all human-robot relationships (and all human-technology interactions) as deeply relational. That is, both robots and humans are formed through their interactions. During Suchman’s visit, the unresponsive Kismet and the disappointed visitors are co-produced. What emerges is different with different actors. When a robot is touched by the instrumentalist hands of an engineer, the aesthetic gaze of the artist, or the sticky fingers of the child in the museum, a new hybrid assemblage comes out. The ‘same’ robot immediately becomes something else, depending upon the expectations, capabilities and resources of both robot and human. Even if the expressive resources of the Kismet include ‘a number of features for expressiveness, including movements of its eyelids, eyebrows, ears, jaw, lips, neck, and head orientation’ (Bekey 2005: 460), the intended meanings of the movements of these components are not necessarily available to all those who interact with him.
The singular distinctiveness of apparently sentient robots is not reducible to the sum of their expressive components, or to the performance of a certain system of code. It is their capacity to reach of threshold of empathic connection or co-presence that produces more intense human-robot connections. This occurs not so much because a robotic form replicates life-like behaviours, but because it is becoming humanoid, or becoming animal.
In an dense and explosive chapter in A thousand plateaus, Deleuze and Guattari (2004) develop a conceptualisation of becoming that is distinct from copying or sharing proportions.
…becoming is not to imitate or identify with something or someone. Nor is it to proportion formal relations. Neither of these two figures of analogy is applicable to becoming: neither the imitation of subject nor the proportionality of a form. Starting from the forms one has, the subject one is, the organs one has, or the functions one fulfills, becoming is to extract particles between which one establishes the relations of movement and rest, speed and slowness that are closest to what one is becoming, and through which one becomes. This is the sense in which becoming is the process of desire. This principle of proximity or approximation is entirely particular and reintroduces no analogy whatsoever. It indicates as rigorously as possible a zone of proximity or co-presence of a particle, the movement into which any particle that enters the zone is drawn (Deleuze et al 2004: 300-301).
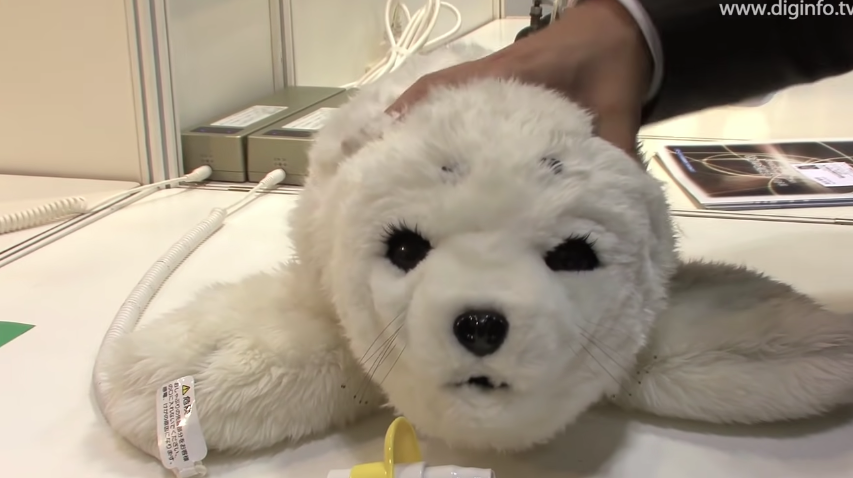
When a robot is becoming human, becoming animal, or becoming intense in some other way, this intensity is particular to the system of relations. A military robot or drone would establish polarised fields of intensity of delegated power and terror. The robot seal PARO, designed specifically for a more nurturing affective relationship, in the tradition of Kismet, will make affective connections not through resemblance, but becoming.Technological objects become socially present even without resembling people or behaving responsively. For their book The Media Equation, Nass and Reeves (1996) conducted a series of psychological experiments that showed people are polite to computers, feel their social space invaded by large screens, and attribute devices personalities. By implication, the challenge for social robotics is not to reach the threshold of human-computer social interaction (which is almost a given), but to generate a becoming sentient with aesthetic, ethical and affective richness and resonance.
References
Bekey, G.A., 2005. Autonomous Robots: From Biological Inspiration to Implementation and Control, The MIT Press.
Deleuze, G., Guattari, F. & Massumi, B., 2004. A thousand plateaus, Continuum International Publishing Group.
Reeves, B. & Nass, C., 1996. How people treat computers, television, and new media like real people and places, CSLI Publications and Cambridge university Press.
Suchman, L., 2006. Reconfiguring Human-Robot Relations. In The 15th IEEE International Symposium on Robot and Human Interactive Communication, 2006. ROMAN 2006. pp. 652–654.
Leave a Reply